Machines that convert electrical energy o mechanical force is called motor. Depending on the type of electrical input that is used, it can be either dc or ac motor. Motors work on the principle of electromagnetic induction. All types of AC motors with its applications and disadvantages are discussed below
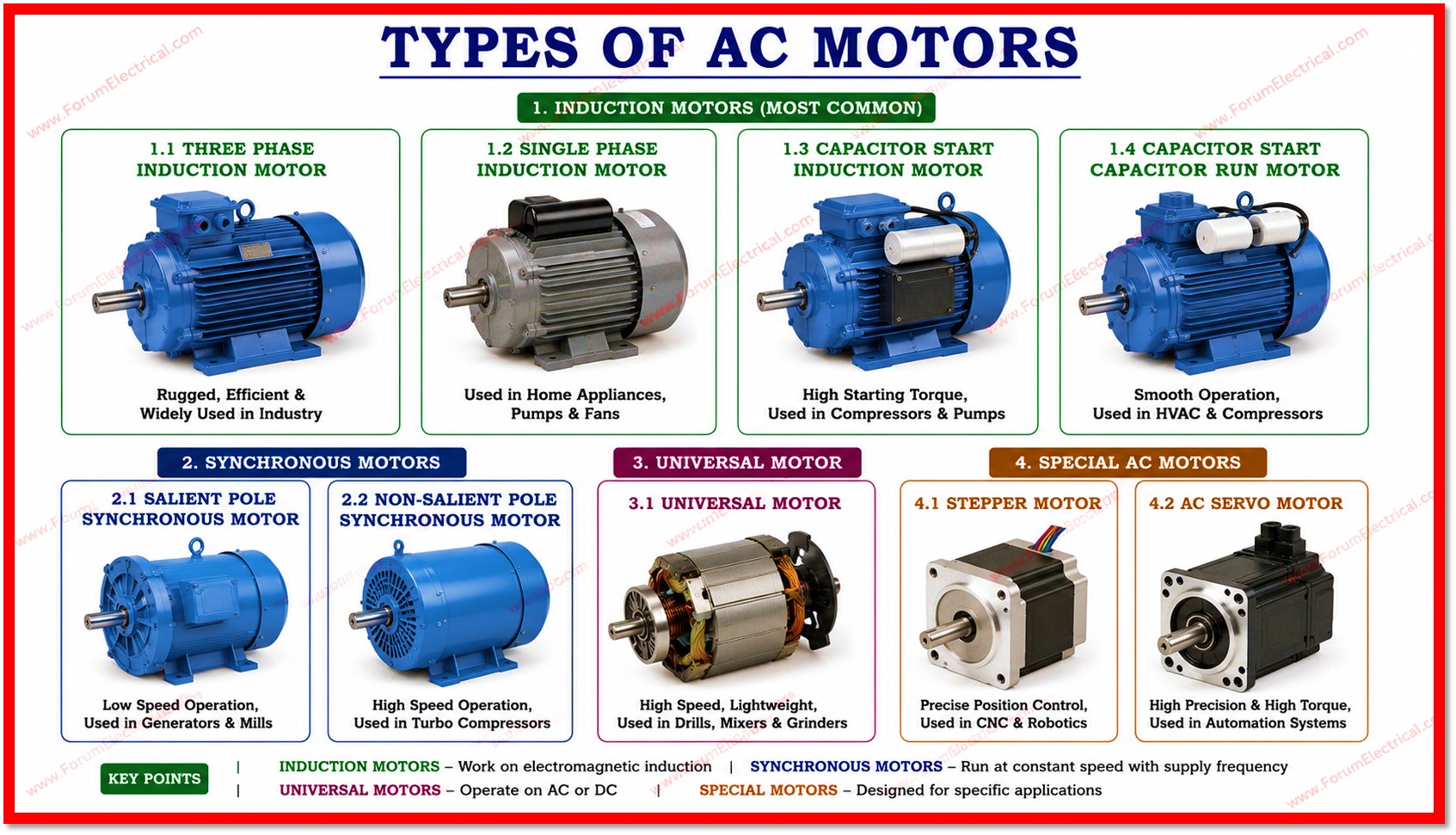
Classification of AC motors

Alternating currents are used to energise the system in an AC motor. General construction of a motor includes a stator- the outside stationary part and an rotor- the rotating part inside that is attached to an shaft that contributes to the mechanical movement.
Induction motor
Working principle of Induction motor
Alternating current is supplied to the stator which is wound with coils. These currents carrying coil generate a magnetic field perpendicular to the direction of the current around the coil. With an alternating current, the direction of the current changes the orientation of the magnetic field thus a rotating magnetic field is produced. The speed of the rotating magnetic field is called Synchronous speed Ns. When a closed loop conductor is in the vicinity of the magnetic field that fluctuates, a current is induced in it. This current induced in the closed loop will generate its own magnetic field which makes the conductor to move.
This is applied in a motor where the rotor coils are the closed loop conductor which prompts the rotor to rotate. The speed of the rotor Nrotor is always less than the synchronous speed. If the rotor and the rotating magnetic field have the same speed, the phenomenon of rotating magnetic field cutting the conductor does not occur thus the rotor stops moving. But as it slows, the effect of rotting magnetic field will induce a current in it thus making it rotate. Thus the rotor can never catch up to the speed of the magnetic field but t the same time it is self-starting. According to lenz law, whenever an current is induced in the coil. An emf called the back mf is also induced which will try to stop the effect of the current induced trying to slow down the system. To over come this the rotor has laminated iron core (iron core covered in nonconducting varnish) in them which will reduce the back emf.
Types of Induction motor
Depending on the input supply, they may be poly phase or single phase induction motors. Poly phase induction motors are of two types: 1. Squirrel cage rotor Most common type of inductance motor, the rotor is made of laminated iron core covered with varnish in a gear shaped structure with spacing for the rotor rods that is placed in a conducting cylinder shaped like the pet exercise rotating wheel. It consists of two rings placed apart connected to each other by parallel rods. The rings termed as end rings ad the rods are made of cast aluminium or copper. Using copper increases the efficiency by reducing the resistance in the rotor. During loading condition initially, high current is drawn for a high magnitude rotating magnetic field to start the rotation of the rotor. They are cheaper and rugged so they can be used in various application especially where the motor cannot have constant maintenance. 2. Wound rotor The problem with the squirrel cage rotor is the high initial current that it draws from the supply to initiate the rotor. In motors with 10s of KW in rating, this is a major issue that large currents to the order of burning out the other circuitry will be drawn, to compensate for this initial resistance is provided to the rotor. The resistance is provided by slip rings and brushes arrangement which is then shorted as the rotor starts to increase its speed. When the resistance of the slip rings Is removed, this acts just like a squirrel cage rotor. These rotors are costly with high maintenance due to the brushes and slip rings. They are used for traction i.e. in locomotives. These type are also used where variable speed is necessary, the speed controlled by engaging the slip rings (resistance) which now a days variable frequency drives do.
Single phase induction motor While this do not have a variable rotating magnetic field due to the absence of multiple phases. They do have a rotting magnetic field that rotates in opposite directions forming the two poles of a magnet. Since a fluctuating magnetic field is absent, the rotor should have a magnetic field. Depending on the ways the rotor magnetic field is developed, the single-phase induction motors are of the following types.
-
Split phase: The best way to mimic a poly phase induction motor is to split the single phse into two phase input with a 90 degree phase change between them. The phase change is introduced by involving a capacitor or a resistor in series with the winding.
a. Split phase capacitor start: A capacitor with high capacitance is introduced to the winding at the start of the motor to introduce a torque. The capacitor is disconnected as the motor gains speed. Providing higher starting torque, the ae used in air compressor or conditioning applications.
 b. Resistance start:
A starter is added in series with the split input. While they do provide phase shift the shift is not high enough. To include a starter, thin wires are wound large number of times at any one of the poles, this will give high resistance and low inductive effect. Though the starting torque is not as high as a capacitive split phase, it can be used in applications with easy starting.
b. Resistance start:
A starter is added in series with the split input. While they do provide phase shift the shift is not high enough. To include a starter, thin wires are wound large number of times at any one of the poles, this will give high resistance and low inductive effect. Though the starting torque is not as high as a capacitive split phase, it can be used in applications with easy starting.
 c. Permanent split capacitor:
The capacitor is included in the circuit in series with the primary and auxillary winding providing a phase shift to the setup. This capacitace is notturned off by a switch once the rotor starts the rotation. Used in applications where the reversal of the rotation is needed with variable torque requirement. Eg : In a lift. The capacitance used has low impedance to reduce losses.
c. Permanent split capacitor:
The capacitor is included in the circuit in series with the primary and auxillary winding providing a phase shift to the setup. This capacitace is notturned off by a switch once the rotor starts the rotation. Used in applications where the reversal of the rotation is needed with variable torque requirement. Eg : In a lift. The capacitance used has low impedance to reduce losses.

- Shaded pole rotor: The rotor poles are covered partially by windings of copper coils that are shorted to poles at 30 and 60 degrees of excitations. The coils provide a rotating , fluctuating magnetic field that is developed due to the induced current from the stator magnetic field. But the induced current will lead to a induced emf which opposes the current and thereby introducing a lag with respect to time. The torque thus produced is very low and can only be used to design motors till 50W power. They are used in applications like the fan.
Single phase induction motors are not self-starting like the squirrel cage polyphase motors.
Synchronous motor
Structure of a Synchronous motor
A synchronous motor is used in applications where precise speed control is necessary. The rotating magnetic field and the rotor rotate at the same speed. To rotate at the same speed, there should be a rotating magnetic field and a constant magnetic field. The reason is explained below. The stator winding like a normal AC motor has an alternating current that flows through it which constitutes a rotating magnetic field. This magnetic field induces an emf in the rotor windings. The rotor can be a permanent magnet or an electromagnet which is energized by a DC current to have constant magnetic field. Working of a synchronous motor: When a figurative south pole at the stator (due to the Applied AC) is in line with the North pole of the rotor permanent magnet, They attract each other and hence the rotor can rotate at the same speed of the alternating magnetic field (synchronous speed). But for that an inertia is needed. Without the initial push, by which the rotor coil is induced to produce North and South poles, the rotating magnetic field fluctuates and due to same pole repulsion, the rotor does not start. For this initial push, the rotor winding is connected to an DC input. After the initial DC supply, the input can be cut off as the rotation depends on the force of attraction between the poles. Of both the magnetic field. , Without the constant magnetic field, the motor will act as an induction motor. Since the rotation of rotor is based on the magnetic field, the motor can provide uniform speed for any load given that it is in the specified range of the motor. This is not self-starting.
Types of Synchronous motors:
Synchronous motors are divided into the following
- Polyphase : These are the synchronous motors that has been discussed above with a 3 phase input supply to the stator providing a rotating magnetic field with speed Ns. Slip rings are used to provide the DC supply needed for the rotor to attain a constant magnetic field.
- Brushless polyphase: Magnetic field in the rotor is induced by an external supply. AC brushless motor depends on the square wave input from the Hall effect sensor ( active device) that produces a voltage voluntarily based on the sensing variable.
-
Single phase – reluctance Based on the principle that a conductor will move to complete a flux path with minimum reluctance if it is unrestrained. A rotor without coils and slots cut along the length to correspond to the number of poles of the stator ( poles in stator = poles in rotor) will move to align itself to a minimum reluctance position (pole to pole) when the stator is energized. Though they are used in very low power applications like in CD drives
-
Hysteresis motor Similar design as a capacitor type induction motor but with the rotor having slots in its solid magnetized steel body instead of windings. rotor is run at below synchronous speed with a high precision in variable speed is needed. Eg: tape recorder, clock drive. Here there is an increased effect of hysteresis which is lagging that is found. They have low torque .
Special type of motors
-
Universal motor: Both AC and DC input can be given to the stator and rotor separately. They are almost always series connected.
-
Repulsion motor A type of wound rotor AC single phase where the rotor moves by means of repulsive force between the stator magnetic field and the rotor.
-
Exterior rotor: The rotor is outside while the stator is inside and it is used in stable speed applications
-
Sliding rotor: The motor contains a braking system, where a spring is used to hold the rotor stationary by pressing the braking ring to a cap. When the stator is energized, it releases the spring that frees the rotor to slide, also an induced magnetic field is developed in the rotor to help it rotate. They have high starting torque and are used in application where there is use of gear train. Like cranes and hoists with good mechanical accuracy.